第一章中我们介绍了TOF的基本原理,应用,系统架构和分类。本章和下一章,我们会详细介绍dTOF和iTOF系统,从他们的系统原理,架构和零部件性能出发,分析重要的系统参数,进而理解这两种系统的不同以及其中部件的选择。阅读本章前,请阅读第一章。
dTOF基本原理和核心组件
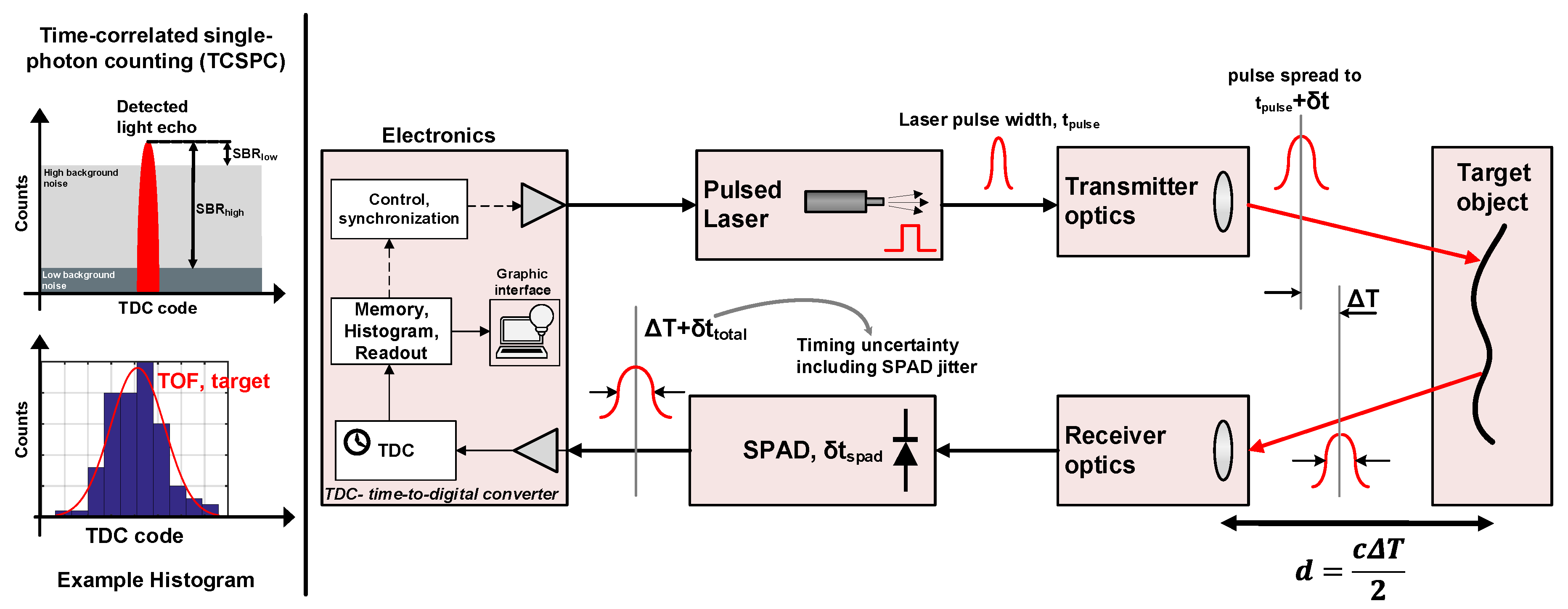
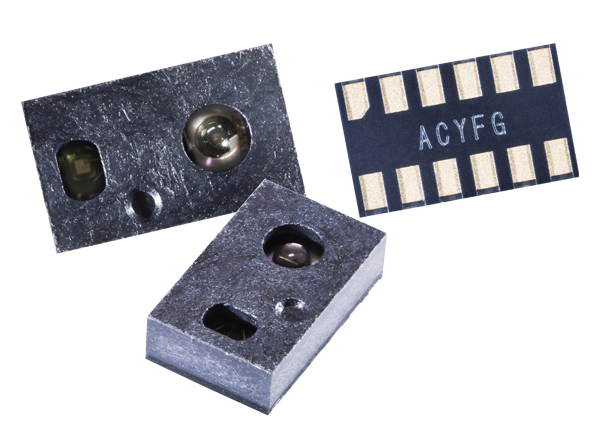
如第一章的介绍,dTOF的原理很直接,就是使用时间相关单光子计数法(TCSPC,Time correlated single photon counting)直接测量光飞行的时间。下图展示了一个更具体的dTOF系统图(引用),以及AMS的一个TOF临近传感器模组1D Proximity Sensor TMF8801,我们可以看到发射端,接收端以及模组的pin脚。根据系统原理图和实际模组,我们来分析一下dTOF的基本原理,核心组件和系统参数。
激光驱动
Laser Driver是发射端电路的主要部分,负责驱动Laser,控制电路发出数字脉冲信号,一般使用该信号控制MOSFET进行开关,控制激光发射。
激光器
在dTOF中,激光器负责发射激光。采用激光的主要原因是激光光谱窄,能量强度高,调制速度快,而且易于集成。电子消费品的dTOF应用中,主要使用的是垂直腔表面发射激光 Vertical Cavity Surface Emitting Laser (VCSEL)。在一些其他平台或者应用中,尤其是车载激光雷达中,会更多的使用功率更高的EEL(Edge Emitting Laser)和光纤激光器。一般,电子消费品使用的dTOF会选择850nm或者940nm的激光。(根据第一章我们的说明,850nm和940nm处的太阳光谱都有水的吸收峰。940nm的环境光强更小,所以噪声小;但是传感器在850nm的量子效率(QE)是940nm处的两倍,接收信噪比更好。)
数字电路产生的脉冲方波输入给激光驱动,变成实际的光脉冲后,在时域上可以看到由完美方波,变成了不那么完美的方波(图示里是画的比较夸张,实际上,VCSEL的脉冲调制性能已经非常好了)。由于激光驱动的响应速度,这里在时域上产生了一个不确定性的参数,即为δ-laser(图中的δ-t)
发射端光学
发射端一般为一个简单的光学镜头,把激光能量发射到需要的视场角内,有一些应用也会使用准直镜+DOE等元器件,把VCSEL发出的光线先准直,然后分成很多束光线指向不同的视场角方向。
接收端光学
接收端光学零部件需要的主要是收集期望测量的视场角内的光线,这种镜头F数越小越好,相对照度越高越好,同时镜片上可以进行一定的镀膜增强透光性,同时接收端会使用尽量窄带的滤光片,去滤除其他波长的杂光干扰。
接收传感器SPAD
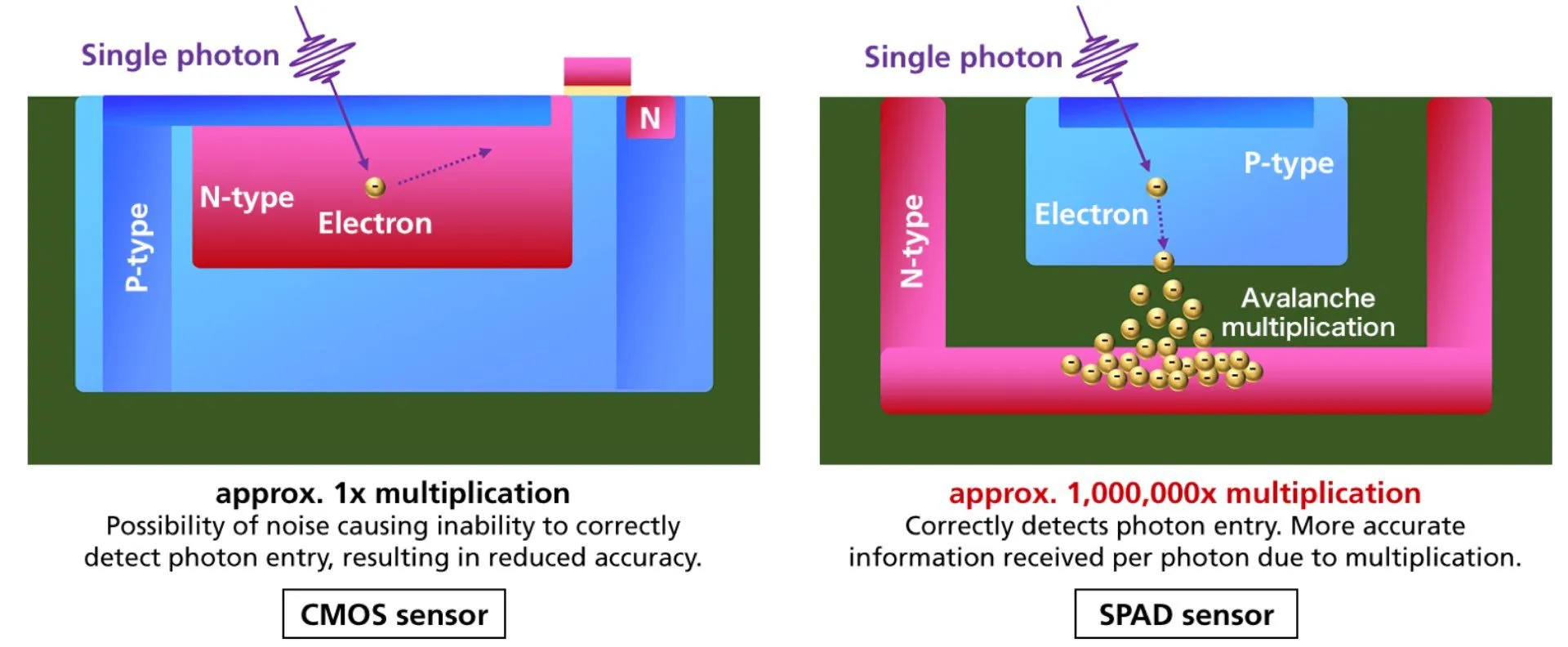
dTOF应用中主要使用的接收传感器为single-photon avalanche diode (SPAD)单光子雪崩二极管或Silicon photomultipliers(SiPM)硅光子光电倍增管,他们的主要区别是每一个SiPM像素里包含多个SPAD像素。不同于传统CMOS传感器,对于光的接收时积分形式的,既接收某一时间段内的光强,转换为电流;SPAD如其名字所描述的,可以对单一光子进行相应,只需要一个光子就能触发一次强的雪崩,产生电流信号。可以说,SPAD输出的就是有光1和没光0两种状态(见下图)。SPAD传感器芯片每次被光子激活后,电子淬灭电路降低二极管中的电压使其在短时间内低于阈值电压,因此雪崩停止,经过一段恢复时间,探测器可以探测其它的光子,这个恢复时间决定了传感器的识别速度。
SPAD的像素相对于传统CMOS图像传感器来说还无法做的很小,比如一款传统图像传感器,三星的GN1,50MP,1/1.31”大小,像素大小1.2um。而SPAD的像素大小很大,这是由于其需要各种电路对SPAD进行复位造成的。比如根据机构的分析,iPhone中使用的Lidar是Sony的SPAD传感器,只有30K的像素数,每个像素10um大小。所以SPAD的传感器限制了dTOF的空间分辨率。
信号被SPAD接收后,会再产生一个一个时间不确定性因素δ-tSPAD,这个是SPAD的响应速度决定的。

TDC电路
Time-to-digital converter(TDC),时间数字转换器,是将模拟信号转换成以时间表示的数字信号的电路,TDC输出了每一个脉冲与所设起始点相比被记录下来的时间。这些脉冲被记录下来后,转换成直方图,然后通过比较哪个时间的直方数量最大,确认目标物的位置。TDC电路的精度也会对时域信号产生影响,引入了一个不确定性δ-tTDC。通过TDC电路后的电路,都是数字电路。
系统参数
探测距离
一款dTOF可以探测多远的距离?根据系统的基本原理,理论上,只要发出去的光子到了目标物上,然后被反射回来,被接收端接收到,并且被最终的算法识别,认定为非噪声的信号即可。所以,理论上,只需要接收端在目标物上看到的该波长的信噪比足够即可。所以,针对于不同探测距离的应用场景,dTOF在发射端或者接收端也可能使用不同的技术方案。比如对于电子消费品,探测距离在5m内,使用VCSEL作为发射端,但是对于车载类应用,探测距离要达到100m甚至更远,VCSEL去照亮整个视场的功率远远不够,这就需要使用EEL或者光纤激光器扫描整个视场,既一个一个点的照亮视场的方式。
最大无歧义探测距离
假设我们发射了两个脉冲,第一个脉冲发射的早,但是飞行的远,第二个脉冲发射的晚,但是飞行的近,这样,第二个脉冲回来的早,第一个脉冲回来的晚,识别的时候,我们就会弄混两个脉冲。那如何能尽量分辨两个脉冲呢?最简单的方法就是把两个脉冲的发射间距拉长。其中,不造成混叠的最大无歧义探测距离为c*脉冲间隔/2,也等于c/2f,f为激光的调制频率。假设我们的激光调制在1Mhz,那么最大无歧义探测距离就是150m。所以,探测5m范围的dTOF可以使用更高的调制频率,就是因为探测距离足够小,并不会有脉冲间隔产生的距离歧义问题。
探测距离的精度和误差
精度
假设一个脉冲的宽度为Δt,一个激光器把它发射出去后,接收端收到了反射回来的光子,但是接收端无法知道这个光子是来自于脉冲刚刚开始的第一个光子,还是脉冲结束时的最后一个光子,所以即使没有任何噪声或者不确定性的情况下,dTOF的距离探测精度,本质上是受限于脉冲宽度的,距离探测精度ΔR = c*Δt/2。假设每个脉冲宽度为1ns,那么ΔR = 0.15m。VCSEL作为一种半导体激光器,响应速度很快,可以达到ps级,假设脉冲宽度达到0.1ns,那么,ΔR 就可以达到0.015m,既15mm的探测距离精度。通过这个公式,我们可以看到,dTOF的探测距离精度,并不随距离的增加有所下降,这是dTOF一个很大的优势,也是dTOF类型的系统会使用在长距离场景探测的主要原因(车用激光雷达)。
误差
探测距离d = cΔT/2,根据前面一部分的分析我们看到,在发射端到接收端的各种零部件上,在脉冲的时域上产生了很多的不确定参数,其中由数字电路产生的ΔT,经过激光驱动产生的激光脉冲产生了时间不确定参数 δlaser;被SPAD探测到后,SPAD的响应产生了 δSPAD;TDC电路的响应,产生了 δTDC。由此,总计的探测时间不确定RMS如下公式所示,其中δother是系统中的其他统计上独立的不确定参数,可能包括其他电路部分的响应,pixel之间互相的影响等,但是整体上这部分是相对比较小的。那么,测量误差为c*δtotal

降低误差可以使用在发射端放置一个Reference SPAD,接收刚刚发射出去的VCSEL的光线,用以确认发射的时间,以及参考距离0米的位置。
噪声和抗干扰能力
背景噪声
背景噪声是TOF需要面对的主要问题,当背景噪声能量大于发射信号能量时,接收端完全无法得到足够的信噪比去发现发射信号。室内和室外的阳光直射,反射能量在一个很大的区间。所以一个dTOF在最初设计阶段,要确认在什么应用场景下,多大的距离范围内有效。一般的电子消费品类的TOF都是定位主要面对室内场景。(见图1左上角)
强光环境下,SPAD很容易就被背景噪声激活过曝,如果我们要在上面增加衰减镀膜,那当我们进入室内,我们自己VCSEL发出的能量也被衰减到没有任何光子进入SPAD了。解决方法之一就是使用多个SPAD像素,比如100个SPAD像素,其中10个像素10%的衰减,10个像素20%的衰减,以此类推。这样,他们就包含了一个可以测量的背景噪声范围,同时增加了像素数量,可以对比各个像素之间的结果用以比对。
前面我们分析了dTOF的探测精度和激光发射脉冲宽度是直接相关的,但是这里我们发现其信噪比和每次发射的能量又是直接相关的。短的脉冲每次发射的能量也会小。所以dTOF希望发射尽量短的高能量的脉冲。但是请注意电子消费品的激光能量要收到IEC60825标准的限制,所以非常高的能量也是不可取的。
串扰Cross-talk
串扰可能产生于相邻SPAD像素之间,解决方案就是对这些像素进行隔离,这样就降低了传感器的filling factor。
串扰可能是发射端的光线在模组内部直接反射进了接收端,解决这种串扰的方法是隔绝开发射端和接收端。
串扰可能是发射端的光线在手机的前玻璃面板中发生了反射,进入了接收端,解决这种串扰的方式是算法以及在发射端放置一颗SPAD芯片作为参考信号或者进行后期的标定和校准。
多路径干扰
dTOF抗多路径干扰的能力很强,通过统计直方图和合适的算法,很容易分辨哪些光子是多路反射回来的,哪些是目标物反射回来的。这是dTOF对比iTOF的一大优势。
空间图像分辨率
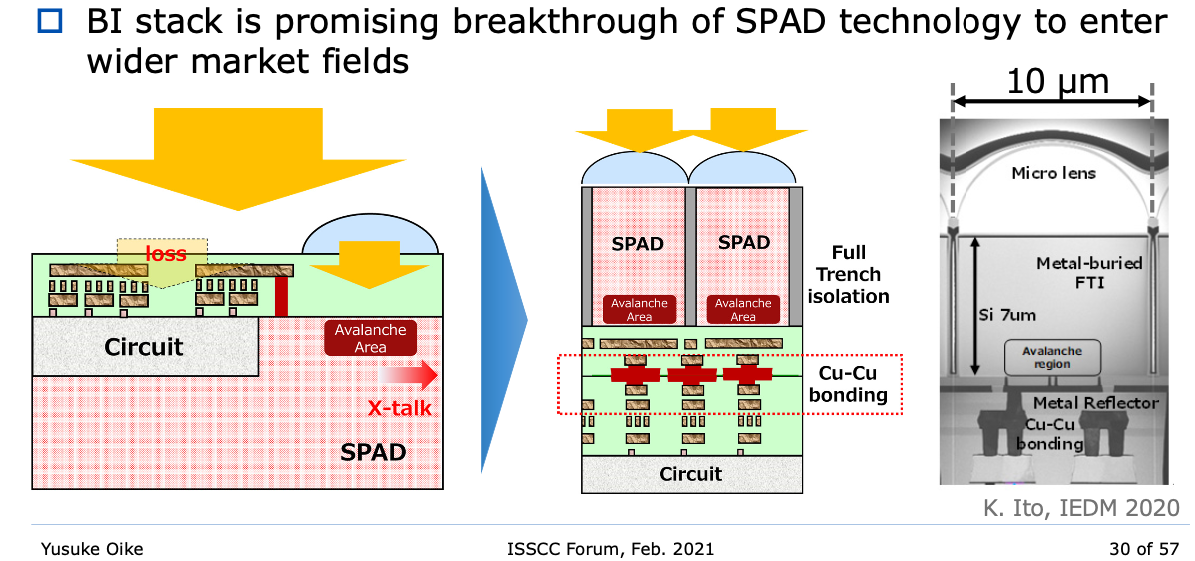
SPAD传感器的传统工艺是前照式FSI(Front Side Illumination)工艺,如下图左所示,用于吸收光子的厚度非常有限,限制了光子的吸收率,同时SPAD的淬火电路(Quenching circuit)部分占据了很大一部分芯片表面,限制了filling factor。Sony基于自己的CMOS技术开发了背照式的SPAD传感器,见下图中和右,大幅度提升了光子吸收率和filling factor以及吸收厚度。据分析,iPhone中的LiDAR使用的是Sony的0.1MP的SPAD传感器,Sony正在不断提升SPAD传感器的像素数量。当SPAD传感器可以达到和使用CMOS类型的iTOF传感器近似的像素数量时,dTOF会被更多手机厂所选择。
功耗
由于dTOF发射的是脉冲,所以功耗上,相对iTOF需要发射连续波以及持续接收,功耗较低。
工艺分析
整体控制电路
基于前面的分析,我们发现dTOF整体上需要一个高速电路,设计和制造高速电路也是一个难点。其中包括了高频调制的激光脉冲的发射,SPAD的相关电路,高速信号的分析等。
SPAD
对比起CMOS类型的芯片,可以提供SPAD的供应商很少,其中有AMS,ST,Sony等。SPAD本身需要较高的电压,这也对电路设计是一个挑战。比如dTOF由于工作脉冲很多,所以数据量非常大,这需要在SPAD芯片上直接实现信号处理。其中包括了可能要使用镜片堆叠工艺等实现,进一步增加了工艺难度。
整体来说dTOF的工艺难度和技术壁垒高,成本也高。
dTOF的标定
标定dTOF可以使用不同光照条件下,放置在不同距离的不同反射率的标板进行标定。比如参考AMS的TMF8805 dTOF模组,其spec中汇报了以下几种场景的识别准确性,同时也可以用这些场景进行标定:
350 Lux Fluorescent Light and 18% Grey Card
350 Lux Fluorescent Light, 18% Grey Card and Smudge on Glass
1 k Lux Sunlight Represented by 170 Lux Halogen Light and 18% Grey Card
1 k Lux Sunlight Represented by 170 Lux Halogen Light and 90% White Card
5 k Lux Sunlight Represented by 830 Lux Halogen Light and 18% Grey Card
参考模组
以下列出一些参考模组,供读者研究学习
AMS系列的临近传感器:TMD2620, TMD2635,TMD8701,TMD8801,TMD8805
版权声明: 感谢您的阅读,本文由超光版权所有。如若转载,请注明出处。